이전 글 : Index buffer
다음 글 : Descriptor layout and buffer
행렬 (Matrix)
행렬에 대하여 잠시 소개하고 가겠습니다.
이미 알고 있는 내용이지만 정리차원에서 적습니다. 보다 자세한 내용은 행렬 관련 내용을 따로 찾아 보셔야 할 것 입니다.
엔진이 배를 움직이는 것이 아니다. 배는 그 자리에 가만이 있으나 엔진이 이 세상을 회전해 움직이는 것이다.
Homogeneous 좌표계
지금까지, 우리는 3D 버텍스를 (x,y,z) 트리플렛(세묶음;triplet)으로서 다루었습니다. 여기에 w 를 소개합니다. 우리는 이제 (x,y,z,w) 벡터를 사용합니다.
이게 무엇인지 곧 알게 될겁니다. 하지만 지금은, 이것만 기억해 두세요 :
w == 1 이면, 벡터 (x,y,z,1) 은 공간에서의 위치 입니다.
w == 0 이면, 벡터 (x,y,z,0) 은 방향입니다.
(사실, 이 부분은 머릿속에 영원이 박아둬야 합니다.)
이게 무슨 차이를 만든다는 거죠? 음, 회전에 대해서 보면, 이것은 아무것도 바뀌지 않아요. 당신이 점이나 방향을 회전 시키면, 같은 결과를 얻게 되죠. 하지만, 평행이동(translation;트랜스레이션) 에 관해서는 (당신이 점을 특정 방향으로 이동시킬때), 변화가 일어납니다. “어떤 방향으로 평행이동(Translate)시킨다” 이게 무슨 뜻일까요 ? 별건 없습니다.
Homogeneous 좌표계에서는 하나의 수학 공식을 사용해서 이어질 두 경우를 다루게 해줍니다.
변환 행렬
행렬에 대한 소개
간단히 말해, 행렬(matrix)이란 미리 정의해둔 개수의 행(rows)들 과 열(colums)들을 이용해서 여러개의 배열(array)을 합쳐놓은 것 입니다. 예를 들어, 2x3 행렬은 아래 처럼 보이겠죠 :
3D 그래픽스에서 4x4 행렬을 주로 사용합니다. 이들은 우리의 (x,y,z,w) 버텍스들을 변형하게 해줍니다. 이는 버텍스를 행렬로 곱하여 이루어집니다 :
행렬 x 버텍스 (이 순서로 곱해야 합니다!!) = 변형된_버텍스

보는 것 만큼 무섭게 어렵진 않습니다. 왼쪽 손가락을 a 에 두고, 오른쪽 손가락을 x 에 둬 보세요. 이것이 ax 입니다. 왼쪽 손가락을 다음 숫자 (b) 에 두세요. 그리고 오른쪽 손가락을 다음 숫자 (y) 에 두세요. 당신은 by 를 얻었습니다. 다시 한번 : cz. 다시 한번 : dw. ax + by + cz + dw. 당신은 새로운 x 를 얻었네요 ! 각각의 줄에 똑같이 해보면, 당신은 새로운 (x,y,z,w) 벡터를 얻게 됩니다.
이 부분은 계산하기 지루한 부분입니다만, 자주 하게 될거에요. 그러니 앞으로는 컴퓨터에게 대신 해달라고 부탁하죠.
C++ 에서 GLM으로 표현
glm::mat4 myMatrix; |
GLSL 에서
mat4 myMatrix; |
평행 이동 행렬
이들은 가장 이해하기 쉬운 형태의 변형(tranformation) 입니다. 평행이동 행렬은 이렇게 생겼습니다 :

X,Y,Z 에 있는 것들이 당신의 위치에서 더하고자 하는 값들입니다.
그래서 벡터 (10,10,10,1) 을 X 방향으로 10 유닛(unit;이동단위, 현실의 어떤 길이에 매칭할 것인지는 개발자 마음.)만큼 평행시키려면 이런 식을 계산합니다

… 그리고 이제 (20,20,10,1) 호모지니어스 벡터를 얻었습니다 ! 기억하세요, 마지막 1은 우리가 위치가 아닌 방향을 다룬다는 의미입니다. 그러니 우리가 만든 변형이, 위치에 관해 다루고 있었단 사실은 바꾸지 않았단 얘기입니다. 좋은 일이죠.
이제 -z 축을 표현하는 벡터에게 어떤 일이 일어나는지 봅시다: (0,0,-1,0)

… 즉 이것이 오리지날 (0,0,-1,0) 방향입니다. 굉장한 일이죠, 제가 앞서 말했던 것 처럼, 방향을 움직인다는 것은 말이 안되죠.
그래서, 평행이동을 어떻게 코드로 수행 하나요?
C++ 에서, GLM을 사용:
#include <glm/gtx/transform.hpp> // after <glm/glm.hpp> |
GLSL 에서 :
vec4 transformedVector = myMatrix * myVector; |
음, 사실은, GLSL 에서는 이럴 일이 거의 없을거에요. 대부분의 시간 동안, 당신은 glm::translate() 를 C++ 에서 행렬을 계산하기 위해 쓸거고, 그걸 GLSL 에 보낼겁니다. 그리고 곱셈만 하겠죠 :
단위 행렬
이것은 특별합니다. 이것은 아무것도 하지않아요. 하지만 말해둡니다. 왜냐하면 A에 1.0을 곱하면 A 가 된다는 사실을 아는 것은 중요하니까요.

c++ 에서
glm::mat4 myIdentityMatrix = glm::mat4(1.0f); |
스캐일링 매트릭스
스케일링 매트릭스는 꽤나 쉽습니다 :

그래서 만약 벡터를 (위치나 방향은 상관없습니다) 모든 방향으로 2.0 배 스케일 하고 싶다면 :

물론 w 는 아직 아무것도 바꾸지 않습니다. 질문이 생길지도 모르죠: “방향을 스케일링” 한다는 의미가 뭐죠 ? 음, 별건 없어요, 그럴일 은 별로 없을테니까요. 하지만 매우 드물게 유용한 경우도 있습니다.
(단위 매트릭스는 (X,Y,Z) = (1,1,1) 로서 스케일링 매트릭스의 유일한 경우임을 알아두세요. 또한 트랜스레이션 매트릭스의 (X,Y,Z) = (0,0,0) 으로서 특별한 경우이기도 합니다)
c++ code
// Use #include <glm/gtc/matrix_transform.hpp> and #include <glm/gtx/transform.hpp> |
회전 매트릭스
이 부분은 조금 복잡할 수 있어요. 여기서는 자세한 사항은 생략합니다. 매일 사용하는데 있어 구체적인 레이아웃을 아는 것은 별로 중요하지 않아요. Matrices and Quaternions FAQ (popular resource, probably available in your language as well). You can also have a look at the Rotations tutorials 을 한번 봐주세요.
C++ 에서 :
// Use #include <glm/gtc/matrix_transform.hpp> and #include <glm/gtx/transform.hpp> |
Cumulating transformations
이제 우리는 벡터들을 어떻게 회전하고, 평행이동하고, 스케일 하는지 알게 되었습니다. 이들 변환들을 합칠수 있다면 굉장하겠죠. 이는 매트릭스들을 함께 곱함으로서 이루어집니다. 예를 들어
TransformedVector = TranslationMatrix * RotationMatrix * ScaleMatrix * OriginalVector; |
!!! 주의사항 !!! 이 라인은 실제로는 스케일링을 먼저 하고나서 그 다음에 회전하고, 그 다음에 평행이동 합니다. 이것이 매트릭스 곱이 동작하는 규칙 입니다.
연산을 다른 순서로 작성하는 것은 같은 결과를 내주지 않을 겁니다. 스스로 해보세요
in C++, with GLM :
glm::mat4 myModelMatrix = myTranslationMatrix * myRotationMatrix * myScaleMatrix; |
in GLSL :
mat4 transform = mat2 * mat1; |
The Model, View and Projection matrices (MVP matrices)
모델과 뷰, 프로젝션 매트릭스는 변환들을 분명하게 구별하기 위한 좋은 도구 입니다. 이들을 안 쓸수도 있습니다 하지만 써야만 합니다. 모든 사람이 이렇게 합니다. 왜냐면 이렇게 하는게 쉬운 길이니까요.
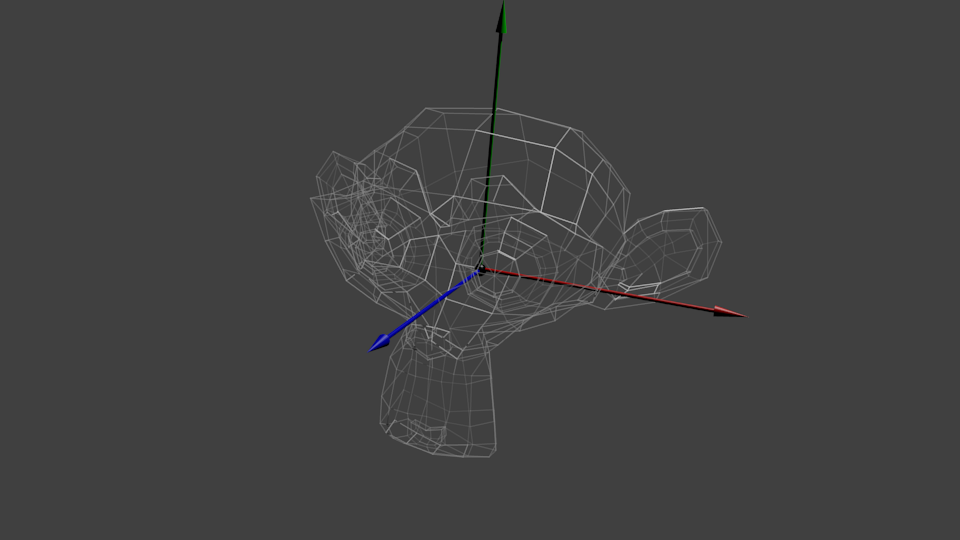
이 모델을 움직이고 싶습니다. 플레이어가 이것을 키보드와 마우스로 조작할수도 있잖아요. 쉽게도, 당신은 방금 배웠어요 : ‘평행이동,회전,스케일’, 그리고 끝. 이 매트릭스를 매 프레임 마다 모든 버텍스들에 적용해야 합니다(GLSL 에서는, 움직이지 않은것은 월드의 중심 에 있습니다)

이제 당신의 버텍스들은 월드 공간_에 있습니다. 이것은 이미지의 검은 화살표를 의미합니다 : _모델 공간에서 (모든 버텍스들이 모델의 중심에 상대적으로 정의된 곳), 월드 공간 (모든 버텍스들이 월드의 중심에 상대적으로 정의된 곳) 으로 갔습니다.

우리는 이것을 이어지는 다이어그램으로 종합할수 있습니다 :

뷰 매트릭스
Futurama 의 말을 다시 이용해보죠 :
엔진이 배를 움직이는 것이 아니다. 배는 그 자리에 가만이 있으나 엔진이 이 세상을 회전해 움직이는 것이다.

이것에 대해 생각해보면, 같은 의미가 카메라에도 적용됩니다. 만약 산을 다른 각도로 보고 싶다면, 당신은 카메라를 옮기거나… 아니면 산을 옮길수 있겠죠. 실제 세상에서는 불가능 하지만, 이곳은 모든 게 간단하고 유용한 컴퓨터 그래픽스 입니다.
그래서, 초기에는 당신의 카메라가 월드 좌표의 원점에 있습니다. 세상을 움직이기 위해서는, 간단히 새로운 매트릭스를 쓰면 됩니다. 당신이 카메라를 오른쪽 (+X) 으로 3 유닛 만큼 움직인다 하죠. 이것은 전체 세상을 (메쉬들을 포함해서) 3 유닛 왼쪽 (-X) 으로 움직이는 것과 같습니다 ! 당신 두뇌가 녹기전에, 어서 해보죠 :
// Use #include <glm/gtc/matrix_transform.hpp> and #include <glm/gtx/transform.hpp> |
또다시, 아래 이미지가 표현하는 바는 : 우리는 월드 공간 (모든 버텍스들이 월드의 중심에 상대적인 곳, 지난 섹션에서 다루었죠) 에서 카메라 공간 (모든 버텍스들이 카메라에 상대적으로 정의되는 곳) 으로 갔습니다.

당신의 두뇌가 터져버리기 전에, GLM의 훌륭한 glm::lookAt 함수를 즐겨봅시다:
glm::mat4 CameraMatrix = glm::lookAt( |
또 강제로 다이어그램을 끌고 왔습니다 :

하지만 사실 아직 끝이 아니에요.
프로젝션 매트릭스
우리는 이제 카메라 공간에 왔어요. 이는 모든 이 모든 변환들이 끝난후, x==0 과 y==0 을 가지게 되는 버텍스는 스크린의 중앙에 그려질거란 거죠. 하지만, 오브젝트를 스크린 어디에 띄울지 결정할때 x 와 y 좌표만 사용하는건 불가능 해요: 카메라로 부터의 거리 (z) 도 물론 세야 합니다 ! x 와 y 좌표가 비슷한 두개의 버텍스들 끼리도, z 값이 큰 버텍스는 다른 것들보다 화면의 중심에 더 가까워 집니다.
이것을 perspective 프로젝션 이라 부릅니다 :

그리고 우리 모두에게 다행이도, 4x4 매트릭스는 프로젝션[^프로젝션] 을 표현할수 있습니다 :
// Generates a really hard-to-read matrix, but a normal, standard 4x4 matrix nonetheless |
우리는 카메라 공간 (모든 버텍스들이 카메라 좌표에 상대적) 에서 호모니지어스 공간 (모든 버텍스들이 작은 큐브 안에 정의되고, 큐브안에 있는 모든 것들은 화면에 띄어집니다)으로 갔습니다.
그래서 마지막 다이어그램 :

여기 또다른 다이어그램이 있습니다, 프로젝션이 어떤 일을 하는지 이해하기 쉬울 겁니다. 프로젝션 전에, 우리는 블루 오브젝트들이 카메라 공간에 있었어요. 그리고 레드 모양은 카메라의 프러스텀을 표현합니다 : 카메라가 실제로 보게되는, 씬의 일부입니다.

모든 것들을 프로젝션 매틀픽스로 곱하는 것은 아래와 같은 효과를 줍니다 :

이 이미지에서, 프러스텀은 이제 완벽한 큐브 (눈으로 잘 파악되지 않지만, 모든 축으로 -1에서 1사이만 존재합니다)가 되었습니다. 그리고 모든 블루 오브젝트들도 같은 방식으로 왜곡되었죠. 따라서, 카메라 근처의 오브젝트 ( = 이미지에서 우리가 못보는 쪽 큐브의 면 근처) 은 크게 되고, 다른 것들은 작아집니다. 실제 세상에서 처럼요 !
이제 프러스텀 “뒤”에서 어떻게 보이는지 봅시다 :

여기 당신의 이미지를 얻었네요 ! 너무 정사각형 인데, 또다른 수학적인 변환이 적용되어 (이것은 자동으로 됩니다. 셰이더로 직접 하지 않아도 되요) 실제 윈도우 사이즈에 맞추어집니다 :

그리고 여기 실제로 랜더 되는 이미지가 있네요 !
변환들 쌓기 : 모델뷰 매트릭스
당신이 이미 알고 있는 일반적인 매트릭스 곱과 같습니다 !
// C++ : 매트릭스 계산하기 |
// GLSL : 적용하기 |
다 같이 놓기
첫번째 : MVP 매트릭스를 생성합니다. 랜더하는 각각의 모델마다 반드시 해주어야 합니다.
// 프로젝션 매트릭스 : 45도 시야각, 4:3 비율, 시야 범위 : 0.1 유닛 <--> 100 유닛 |
두번째 : GLSL
// Get a handle for our "MVP" uniform |
세번째 : use it in GLSL to transform our vertices
// Input vertex data, different for all executions of this shader. |
완료! 튜토리얼 2와 같은 삼각형이 여전히 원점 (0,0,0)이지만, 점 (4,3,3)에서 원근감을 보았을 때, 헤드 업 (0,1,0), 45 ° 시야.

이전 글 : Index buffer
다음 글 : Descriptor layout and buffer
'Vulkan' 카테고리의 다른 글
| Descriptor pool and sets (1) | 2018.02.07 |
|---|---|
| Descriptor layout and buffer (0) | 2018.02.05 |
| Index buffer (0) | 2018.01.25 |
| Staging buffer (0) | 2018.01.25 |
| Vertex buffer creation (0) | 2018.01.25 |